1738 : création du canard mécanique par jacque de vaucanson.
En 1738 jacque créa un canard en cuivre très perfectionner ce canard aurait été capable de cancaner, de digérer de boire et de manger comme un véritable animal.Ce canard fut malheureusement détruit lors d'un incendie au milieu du XIXème siècle.
Entre 1767 et 1774 : création de l'écrivain, du dessinateur et de la musicienne par jaquet droz.

La musicienne :est une joueuse d'orgue qui joue réellement cinq motifs musicaux différents : la musique n'est pas enregistrée ou jouée par une boite a musique, mais bien jouée par l'automate qui enfonce les touches d'un véritable orgue avec ses doigts.
Le dessinateur, construit entre 1772 et 1774, est une poupée capable d'exécuter quatre dessins : un portrait de Louis XV, un couple royal (on pense qu'il s'agirait de Louis XVI et Marie Antoinette ), un chien accompagné de l'inscription «Mon toutou», et un Cupidon conduisant un char tiré par un papillon.
L'écrivain est le plus complexe des trois automte Il utilise un système semblable à celui du dessinateur pour tracer les caractères de l'alphabet, et peut écrire à l'aide d'un jeu de 40 caractères. Le texte est encodé sur une roue dont la longueur des dents détermine le choix du caractère à tracer. Le texte est rarement changé, pour ménager le mécanisme : l'un des derniers changements en date a été fait en l'honneur de francois mitterand qui était venu visiter la ville. L'écrivain utilise une plume d'oie qu'il trempe de temps en temps dans un encrier, en la secouant d'un coup sec pour éviter qu'un trop-plein d'encre ne laisse des pâtés. Ses yeux suivent le texte au fur et à mesure qu'il l'écrit, et sa tête tourne lorsqu'il cherche de l'encre
Les 3 lois de la robotiques:

Ce robot appelé Unimate epar la société américaine Unimation est le premier robot industriel, il reprend la technologie développée pour les besoin du nucléaire. Il est vendu à partir de 1961 et 66 exemplaires seront pour la première fois installés sur des lignes d'assemblages de General Motors.
Naissance du mot Robot:
Le terme robot apparaît pour la première fois dans la pièce de théâtre (science-fiction) de l'auteur Karel Čapek : R. U. R. (Rossum's Universal Robots). Le mot a été créé par son frère Josef à partir du mot tchèque « robota » qui signifie « travail, besogne, corvée ».
Naissance de la robotique :

Le premier à employer le terme robot est Karel Capek, écrivain et dramaturge tchèque du XXème siècle. Il utilisa le terme robot dans sa pièce de science-fiction Rossumovi univerzální roboti (RUR) écrite en 1920. Il inventa le mot robot à partir du mot «rabota» qui signifie «corvée» en slave ancien.
Un robot utilisé en médecine: Da Vinci




Entre 1767 et 1774 : création de l'écrivain, du dessinateur et de la musicienne par jaquet droz.
La musicienne :est une joueuse d'orgue qui joue réellement cinq motifs musicaux différents : la musique n'est pas enregistrée ou jouée par une boite a musique, mais bien jouée par l'automate qui enfonce les touches d'un véritable orgue avec ses doigts.
Le dessinateur, construit entre 1772 et 1774, est une poupée capable d'exécuter quatre dessins : un portrait de Louis XV, un couple royal (on pense qu'il s'agirait de Louis XVI et Marie Antoinette ), un chien accompagné de l'inscription «Mon toutou», et un Cupidon conduisant un char tiré par un papillon.
L'écrivain est le plus complexe des trois automte Il utilise un système semblable à celui du dessinateur pour tracer les caractères de l'alphabet, et peut écrire à l'aide d'un jeu de 40 caractères. Le texte est encodé sur une roue dont la longueur des dents détermine le choix du caractère à tracer. Le texte est rarement changé, pour ménager le mécanisme : l'un des derniers changements en date a été fait en l'honneur de francois mitterand qui était venu visiter la ville. L'écrivain utilise une plume d'oie qu'il trempe de temps en temps dans un encrier, en la secouant d'un coup sec pour éviter qu'un trop-plein d'encre ne laisse des pâtés. Ses yeux suivent le texte au fur et à mesure qu'il l'écrit, et sa tête tourne lorsqu'il cherche de l'encre
Les 3 lois de la robotiques:
Première Loi
Un robot ne peut blesser un être humain ni, par son inaction, permettre qu'un humain soit blessé.
Un robot ne peut blesser un être humain ni, par son inaction, permettre qu'un humain soit blessé.
Deuxième Loi
Un robot doit obéir aux ordres donnés par les êtres humains, sauf si de tels ordres sont en contradiction avec la Première Loi.
Un robot doit obéir aux ordres donnés par les êtres humains, sauf si de tels ordres sont en contradiction avec la Première Loi.
Troisième Loi
Un robot doit protéger sa propre existence aussi longtemps qu'une telle protection n'est pas en contradiction avec la Première et/ou la Deuxième Loi.
Un robot doit protéger sa propre existence aussi longtemps qu'une telle protection n'est pas en contradiction avec la Première et/ou la Deuxième Loi.
Le premier robot industriel:

Ce robot appelé Unimate epar la société américaine Unimation est le premier robot industriel, il reprend la technologie développée pour les besoin du nucléaire. Il est vendu à partir de 1961 et 66 exemplaires seront pour la première fois installés sur des lignes d'assemblages de General Motors.
Naissance du mot Robot:

Le terme robot apparaît pour la première fois dans la pièce de théâtre (science-fiction) de l'auteur Karel Čapek : R. U. R. (Rossum's Universal Robots). Le mot a été créé par son frère Josef à partir du mot tchèque « robota » qui signifie « travail, besogne, corvée ».
Naissance de la robotique :
Le premier à employer le terme robot est Karel Capek, écrivain et dramaturge tchèque du XXème siècle. Il utilisa le terme robot dans sa pièce de science-fiction Rossumovi univerzální roboti (RUR) écrite en 1920. Il inventa le mot robot à partir du mot «rabota» qui signifie «corvée» en slave ancien.
Un robot utilisé en médecine: Da Vinci

Le Da Vinci est composé de deux parties. La première se situe au-dessus de la personne à opérer et comporte trois ou quatre bras manipulateurs. Un bras tient une caméra endoscopique, les autres tiennent des instruments chirurgicaux tels qu'un bistouri, ou plus précisément un électro bistouri qui découpe les tissus à l'aide d'un courant électrique.
La seconde est située à quelques mètres de la première, et comporte un siège sur lequel s'assied le chirurgien, deux écrans devant lesquels ce dernier vient placer ses yeux et qui retransmettent en direct la vue en 3D de la caméra endoscopique située sur la première partie, et deux manettes pour contrôler les instruments chirurgicaux situés sur la première partie.
Plusieurs mécanismes de sécurité sont présents : les bras manipulateurs ne peuvent pas bouger si la tête du chirurgien n'est pas en contact avec la partie permettant de voir le champ opératoire, une protection empêche les bras d'endommager les tissus au niveau du trou par lequel ils pénètrent dans le corps, et une batterie de secours permet au Da Vinci de fonctionner pendant 20 minutes en cas de coupure de courant.
Un robot utilisé dans l'espace: la sonde rosetta
La sonde rosetta est robot sur une comète. Ce robot a été lancée le 27 février 2004 la sonde
rosetta a transportée le robot philae sur la comète Churyumov-Gerasimenko. Une première
dans la conquête spatiale. le voyage a duré 10 ans et couvert une distance de 6,5 milliards
de kilomètres. La sonde a largué le robot sur la comète, malgré un atterrissage chaotique
philae a pu se mettre au travail.
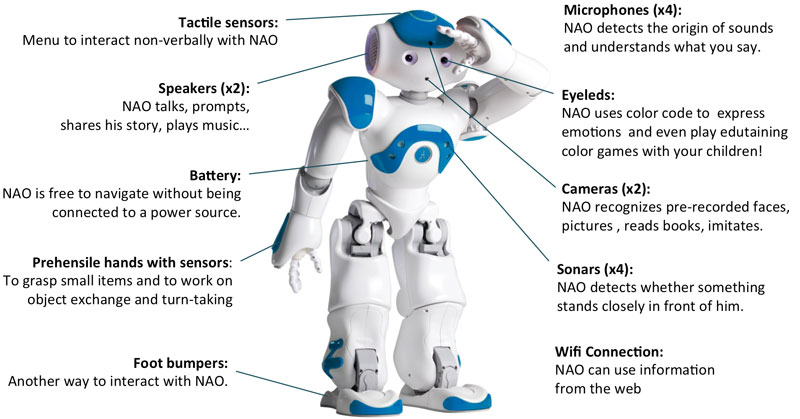
Un robot humanoide: Nao:

Depuis sa création, plusieurs de ses caractéristiques ont évolué. Six versions sont disponibles selon les besoins des laboratoires et des autres utilisateurs.
– Hauteur : 58 cm
– Poids : 4.8 kg
– Autonomie : 90 mn
– Degrés de liberté : 14 à 25
– Processeur : Intel Atom 1.6Ghz / AMD Geode 550Mhz
– Compatibilités : Linux, Mac OS, Windows
– Système intégré : Linux
– Programmé sous : Java, C++, MATLAB, Urbi, C, . Net, Python
– Connectivité : Ethernet, Wi-Fi
– 1 accéléromètre sur trois axes, 2 gyromètres, 2 sonars, 8 capteurs de pression, 2 bumpers
– 4 microphones
– 2 haut-parleurs
– 2 caméras HD
– Un capteur sur la tête
– Poids : 4.8 kg
– Autonomie : 90 mn
– Degrés de liberté : 14 à 25
– Processeur : Intel Atom 1.6Ghz / AMD Geode 550Mhz
– Compatibilités : Linux, Mac OS, Windows
– Système intégré : Linux
– Programmé sous : Java, C++, MATLAB, Urbi, C, . Net, Python
– Connectivité : Ethernet, Wi-Fi
– 1 accéléromètre sur trois axes, 2 gyromètres, 2 sonars, 8 capteurs de pression, 2 bumpers
– 4 microphones
– 2 haut-parleurs
– 2 caméras HD
– Un capteur sur la tête

Commentaires
Enregistrer un commentaire